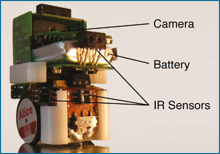
Swarms of tiny robots have given up their selfish ways and started sharing resources for the greater good. Though this might sound like the plot of a bad summer blockbuster, it is real news. This month, a team of Swiss researchers announced that they’ve used robots to simulate biological evolution. The simple, mobile robots — each a little larger than a sugar cube — began their lives directionless, meandering aimlessly into walls. But after a few generations of natural selection, their computer programs evolved so that they became efficient foragers, purposefully collecting disks that represent food. None of that is particularly surprising. Scientists have long been able to simulate evolution through computer programs that mimic the processes of genetic inheritance, mutation, recombination, and reproduction. What is noteworthy is that many of these robots eventually evolved to help one another, sacrificing personal success to aid other robots in their group. Such altruistic behaviors — which we observe in all sorts of organisms, from humans to slime molds — are a topic of debate among evolutionary biologists, and these big-hearted robots are allowing scientists to test ideas about how such behaviors evolve.
Where's the evolution?
What exactly is the conundrum regarding altruism? In evolutionary terms, altruistic behaviors are those that decrease the fitness of the individual performing the behavior (e.g., a meerkat that sounds the alarm about an approaching jackal, putting herself at a higher risk of attack) and increase the fitness of one or more other individuals (e.g., other meerkats in the colony that are able to escape the jackal attack). We’ve observed many examples of such selfless behavior across the natural world. The question for evolutionary biologists is, how do altruistic behaviors evolve to become common in populations? After all, natural selection decreases the frequency of gene versions that hinder their carrier’s ability to survive and reproduce. Any meerkat that happens to have a gene that causes it to risk its own life for the life of its colony mates should be less likely to survive to reproduce and less likely to pass that altruistic gene on to the next generation. Based on this line of reasoning, natural selection should drive altruistic behaviors out of populations! So what’s going on?
Biologists have considered many different hypotheses to explain the evolution of altruism. One of the most important is based on kinship. The basic idea is that if self-sacrificing behaviors help the altruist’s relatives survive and reproduce, altruistic genes can spread in a population because they are likely to be passed on to future generations through the relatives, although not through the altruist him or herself. To understand this hypothesis, consider the case of the meerkats described above. Imagine that the meerkat sounding the warning (let’s call her Flower) does so because she carries an “altruistic gene.” What happens to the gene if Flower dies but saves the lives of several other individuals in her colony? Well, if Flower is the only one with the altruistic gene, it dies with her. However, if the individuals she saves are her relatives — e.g., her siblings, nieces, nephews, and children — odds are that many of them also carry the altruistic gene and will be able to pass it on to their offspring because of Flower’s good deed. Altruism can spread in the meerkat population in this way. This is one example of kin selection — a form of natural selection that is caused by interactions among related individuals.
Some popular articles describe this hypothesis about the evolution of altruism as one animal helping a relative in order to pass on their shared genes; however, this is a bit misleading. Natural selection has no foresight and does not require any intent on the part of the organism undergoing evolution. Organisms that display altruistic behaviors are not necessarily “trying” to pass on genes through their relatives; they may be unaware of the effect of their actions or — for example, in the case of altruistic slime molds — may not have any sort of consciousness at all!
The hypothesis simply suggests that altruistic behaviors that happen to have the effect of promoting the fitness of relatives can spread — and specifically, that this is more likely to happen the more closely related the altruist and the recipient are, the less the altruist has to sacrifice to help the other, and the bigger the benefit the recipient gets. This makes intuitive sense. Closer relatives are likely to share more of their genes. So Flower’s altruistic gene is more likely to spread if it ends up helping her sibling (who shares half of her DNA) than if it ends up helping her cousin (who shares just 1/8 of her DNA). Similarly, if Flower’s altruistic behavior is very unlikely to get her killed, or is very likely to save the lives of her family, the altruistic gene is more likely to spread. The detailed form of this hypothesis (which gives numerical values to the relatedness of individuals and the benefit and cost of the altruistic act) is known as Hamilton’s rule, after evolutionary biologist W.D. Hamilton who proposed the idea in 1964.
The robots in the recently published study were used to test Hamilton’s rule. Each robot was controlled by a simple computer program (which you can think of as its DNA) with 33 different parts (i.e., with 33 “genes”) that influenced different aspects of the robot’s behavior — its movement, sensing ability, and how likely it is to share disks representing food with others (i.e., its altruism gene). Groups of robots were placed in arenas with food disks to collect. At the beginning of the experiment, each robot had random settings for its computer program. Some robots ran into walls, some stuttered in place, and some, just by chance, happened to move in a way that pushed a food disk. After allowing the robots to show their stuff, the researchers evaluated how well each robot did at obtaining food — a measure of evolutionary fitness. They formed a new generation of robots from the computer programs of the old generation (simulating recombination and reproduction), but with a twist: the better a robot was at obtaining food, the more likely it was that elements of its computer program would make it into the next generation. Each generation, the researchers also “mutated” the robot genomes, introducing small random changes into their computer programs. The researchers repeated this experiment over and over, simulating the robots’ performance — and in each trial, over 500 generations of natural selection, the robots rapidly evolved efficient foraging abilities.
The experimental set-up shown in this video is similar to the one used in this study. At the beginning of the experiment, robots are poor foragers. By the end, many groups have evolved altruistic foraging behaviors.
In the most important part of their study, the researchers tested what would happen if the robots were more or less related to one another — i.e., if some of the robots in a group started off with computer programs that were genetically identical to one another. In these cases, the robots evolved exactly as we would expect them to based on Hamilton’s rule. The more closely related the robot group was (i.e., the more clones it contained), the more likely the whole group was to evolve altruistic behavior and ultimately wind up sharing all their food disks. And the less an individual robot lost by sharing a food disc and the more other robots benefited from shared food discs, the more likely altruism was to evolve. Hamilton’s rule did seem to hold in this simulation, which closely mimicked many aspects of a real, biological population.
This result is important because, in nature, it would be very difficult to perform similar experiments and impossible to perform them over and over again. So, while many different lines of evidence support the idea of Hamilton’s rule, this is the first time that biologists have been able to study it so exhaustively and with such accuracy — albeit in robots instead of actual living organisms. Nature is not always red in tooth and claw; it is often generous, kind, and unselfish — and these results help us understand why such traits have evolved over and over again.
Primary literature:
- Floreano, D., and Keller, L. (2010). Evolution of adaptive behaviour in robots by means of Darwinian selection. PLoS Biology. 8: e1000292. Read it »
- Waibel, M., Floreano, D., and Keller, L. (2011). A quantitative test of Hamilton's rule for the evolution of altruism. PLoS Biology. 9: e100615. Read it »
News articles:
- A quick summary of the discovery from Wired
- A description of the research from from the Los Angeles Times
- A detailed blog post about the research, with discussion of some of the mathematics behind the study, from Discover
Understanding Evolution resources:
- Review the concept of fitness. What does it mean to say that individual A is more evolutionarily “fit” than individual B?
- The article above describes a simulation of evolution that uses robots. In that research, what factors contribute to an individual robot’s fitness?
- Review the process of natural selection. What is the key difference between the evolution of a trait like camouflaged coloration via natural selection and the evolution of a trait like altruism via kin selection? What are the similarities between these two processes?
- Research and describe an example of altruism that kin selection might help explain and that is not mentioned in the article above.
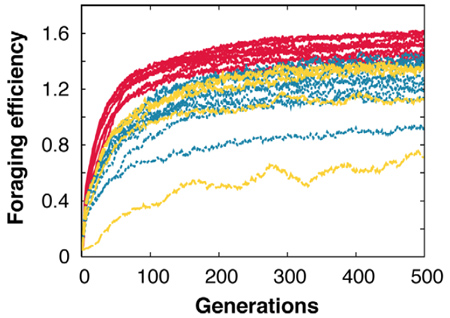
- Advanced: Review the graph in the article above, as well as the definition of Hamilton’s rule. The figure shows the change in average foraging efficiency in populations of robots over the course of 500 generations of natural selection. Red lines represent populations in which rB < C, blue lines represent populations in which rB > C, and yellow lines represent populations in which rB = C. Recall that in Hamilton’s rule, r represents the relatedness between the altruist and recipient, B is the fitness benefit given to the recipient, and C is the fitness cost to the altruist.
- Which color represents populations in which you would expect Hamilton’s rule to lead to the evolution of altruism?
- Which populations evolved the most efficient foraging abilities? How do you know?
- Were those populations (the ones with the most efficient foraging abilities) likely composed of altruists or selfish individuals?
- Can you think of any explanation for the relationship between selfishness and evolved foraging ability?
- Advanced: Review the definition of Hamilton’s rule. It is difficult to devise experiments that test this idea with real organisms in nature. However, many observations of the natural world support the idea that Hamilton’s rule has played a role in the evolution of altruism. Describe at least one sort observation of real organisms that would support Hamilton’s rule — i.e., if Hamilton’s rule had played a role in the evolution and maintenance of altruism in some group of organisms, what would you expect to be true of the altruistic acts?
- Teach about simulations of selection: In this classroom activity for grades 9-12, students build and modify paper-and-straw "birds" to simulate natural selection acting on random mutations.
- Teach about the evolution of behavior: This news brief for grades 9-16, explains how the evolutionary implications of cheetah behavior may help conservation efforts targeting these endangered animals.
- Teach about the evolution of altruism: This article for grades 9-16 explains how understanding the evolution of fire ants may help scientists control the spread of these pests.
- Waibel, M., Floreano, D., and Keller, L. (2011). A quantitative test of Hamilton's rule for the evolution of altruism. PLoS Biology. 9: e100615.