
Right around 350 million years ago, long before the evolution of dinosaurs or mammals, animals that looked a lot like oversized amphibians started colonizing dry land. Over the past few decades, scientists have discovered many more fossils of these critters and learned about their anatomy and diversity. But we’re still not quite sure how our earliest four-legged cousins walked — did they slink around on their bellies, like salamanders, or did they hold their legs underneath their bodies, more like crocodiles? And what does this mean for the evolution of terrestrial locomotion? A recent study brings us a big step closer to the answer.
Where's the evolution?
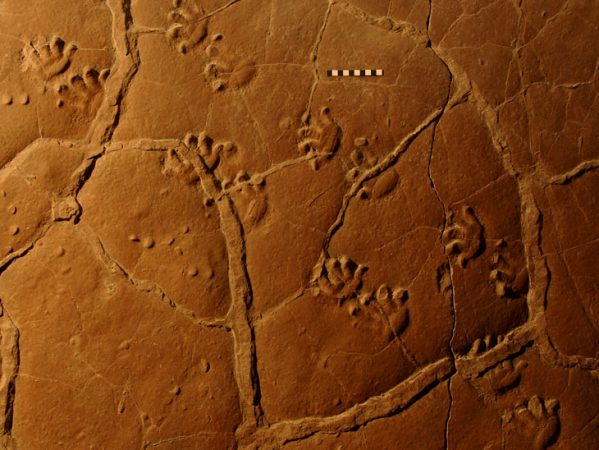
Paleontologists typically use either an extinct animal’s bony anatomy or its footprint trackways to piece together how it moved. This is where most existing hypotheses about the locomotion of early terrestrial vertebrates come from. But if paleontologists are really lucky, they might find both the skeleton and the footprints of the same animal — and this is the case for a four-legged herbivore called Orobates, which lived almost 300 million years ago in what’s now central Germany. In early 2019, a team of researchers from Germany, Switzerland, and the UK took advantage of this unique opportunity to create a new approach for reconstructing locomotion.
The researchers first used information from the shapes of Orobates’ bones and the positioning of its footprints to create 3-D computer simulations of many potential gaits, or ways of walking. By preventing Orobates’ bones from bumping into each other and controlling parameters like how much its spine could bend and how much power it used to walk, the team was able to rule out many gaits that were impossible or unlikely based on studies of extant animals. Then, they tested gaits that still seemed possible by building a robot (affectionately named OroBOT) to check if they could truly create trackways like those in the fossil.
The team’s combination of computational and robotic analyses led them to conclude that Orobates walked fairly upright, more like a crocodile than a salamander. This outcome was surprising because most scientists have assumed that early vertebrates had to drag themselves along the ground, and that more “advanced” modes of locomotion didn’t evolve until millions of years later. But in the light of these results, we now understand that animals didn’t steadily progress towards upright locomotion — rather, many locomotor styles evolved early on in vertebrate history.
Primary literature:
- Nyakatura, J. A., Melo, K., Horvat, T., Karakasiliotis, K., Allen, V. R., Andikfar, A., ... & Fischer, M. S. (2019). Reverse-engineering the locomotion of a stem amniote. Nature,565(7739), 351. Read it »
- Nyakatura, J. A., Allen, V. R., Lauströer, J., Andikfar, A., Danczak, M., Ullrich, H. J., ... & Fischer, M. S. (2015). A three-dimensional skeletal reconstruction of the stem amniote Orobates pabsti (Diadectidae): analyses of body mass, centre of mass position, and joint mobility. PloS One, 10(9), e0137284. Read it »
News articles:
- A summary of the research from National Geographic
- More coverage of the work by Wired
- A video about the project by Nature
Understanding Evolution resources:
- In your own words, describe how researchers determined that some gaits were impossible or very unlikely for Orobates.
- Do some research online and describe the line(s) of evidence that a different team of scientists used to reconstruct the locomotion of a different extinct animal.
- Read this article. Describe, in your own words, why it’s a misconception to think about evolution in terms of “advancement.” How does this relate to the scientists’ conclusions about how Orobates walked?
- Advanced: What can paleontologists learn about locomotion from footprints that they can’t learn from skeletons? What can they learn about locomotion from skeletons that they can’t learn from footprints?
- Advanced: Visit this website created by scientist John Nyakatura and his colleagues. Select three different parameters (dynamic or kinematic filters) to vary, and describe how changing each one affects which gaits seem possible on the graph. Blue dots represent likely gaits; red dots represent unlikely gaits. To learn more about each parameter, hit the “help” button on the website.
- Teach about how scientists learn about the past: This web-based module for grades 6-12 provides students with a basic understanding of how fossils can be used to interpret the past.
- Teach about interpreting fossil evidence: In this lesson for grades 6-12, students are taken on an imaginary fossil hunt and hypothesize as to the identity of the creature they discover. Students revise their hypotheses as new evidence is found.
- Teach about footprints: This lesson for grades 2-4 introduces students to what kinds of information fossil trackways can give scientists.
- Blob, R. W. (2001). Evolution of hindlimb posture in nonmammalian therapsids: biomechanical tests of paleontological hypotheses. Paleobiology, 27(1), 14-38.
- Sumida, S. S., & Modesto, S. (2001). A phylogenetic perspective on locomotory strategies in early amniotes. American Zoologist, 41(3), 586-597.
- Berman, D. S., Henrici, A. C., Kissel, R. A., Sumida, S. S., & Martens, T. (2004). A new diadectid (Diadectomorpha), Orobates pabsti, from the Early Permian of central Germany. Bulletin of Carnegie Museum of Natural History, 2004(35), 1-36.
- Nyakatura, J. A., Allen, V. R., Lauströer, J., Andikfar, A., Danczak, M., Ullrich, H. J., ... & Fischer, M. S. (2015). A three-dimensional skeletal reconstruction of the stem amniote Orobates pabsti (Diadectidae): analyses of body mass, centre of mass position, and joint mobility. PloS one, 10(9), e0137284.
- Nyakatura, J. A., Melo, K., Horvat, T., Karakasiliotis, K., Allen, V. R., Andikfar, A., ... & Fischer, M. S. (2019). Reverse-engineering the locomotion of a stem amniote. Nature, 565(7739), 351.